
型号:树莓派4B
环境:Python3.7
远程控制软件:VNC Viewer(远程控制时,需要保证都处于同一个局域网中)
- 先去YOLOv5官网下载文件代码,然后在树莓派新建一个YOLOv5文件夹并把下载好的文件传输到里面
- 这里采用YOLOv5-6.0

3.然后安装依赖:
1.2.1、安装opencv

1.2.2、安装pytorch&numpy
首先查看Python版本对应哪个Torch版本和torchvision版本

- whl文件官网
- numpy文件官网
- 树莓派常见pytotch包1
- 树莓派常见pytotch包2
- 本文用到的torch和torchvision版本
去到YOLOv5项目,找到requirements.txt把 numpy、opencv-python、torch和torchvision注释

安装完成图
【方法一】
1、在终端上输入:
2、就会出现一个文本编辑器,在文本内容的exit 0 上面添加一行:
3、然后保存更改, 重启树莓派:
2、 找到autostart 路径,没有就创建一个
3、然后进入autostart 路径
4、 在autostart 中创建一个.desktop 尾缀文件,例如test.desktop
5、 该文件中输入:
其中,Name、Comment、Exec、Icon 分别代表启动项的名称、备注、图标(随便找个png图片)、Exec表示调用的指令,相当于在shell终端执行的指令.,例如sudo python3 /home/pi/yolov5-waste/images_detect.py
6、 最后重启即可观察到该程序自启了。
解决办法: 使用国内源去下载
3.1.1、国内源
- 阿里云:
- 清华:
- 中国科技大学
- 华中理工大学:
- 山东理工大学:
- 豆瓣:
- bfsu:
3.1.2、单次使用
- pip install -r requirements.txt -i https://mirrors.aliyun.com/pypi/simple/
- pip install 单个包名 -i https://mirrors.aliyun.com/pypi/simple/
3.1.3、命令行永久修改
3.1.4、文档永久修改
管你用的是pip3还是pip,方法都是一样的(也即都是创建pip文件夹):
先创建文件夹,然后创建并打开文件(如果你已经有这个文件夹或者文件,那么执行下面的命令可能会报错,这无所谓,目的是有这个文件夹和文件就行)
在pip.conf文件中输入以下内容
之后保存退出即可。
将下载好的Twisted-18.4.0-cp36-cp36m-win_amd64.whl放在E盘下面
包名中间的cp36是python3.6的意思,amd64是python的位数。
在安装python的whl包时,出现了以下问题:

解决办法: 查看当前环境支持包的类型
可以看到,我们下载的whl包,命名不符合python3.8.0的安装支持,按照(‘cp38’, ‘cp38m’, ‘win32’),将其命名为:Twisted-20.3.0-cp38-cp38m-win32.whl 即可。
3.3.1、判断是否正确加载摄像头
检测摄像头
检测video设备

3.3.2、开启摄像头
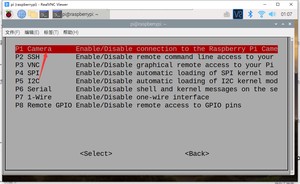
方法一: 系统开启摄像头
将光标移动到摄像头选项( Interface Options)处,并选择启用(Enable)。

将光标移动到摄像头选项(Camera option)处,并选择启用(Enable)。在退出 raspi-config 时会要求您重新启动。启用选项是为了确保重启后 GPU 固件能够正确运行(包括摄像头驱动和调节电路),并且 GPU 从主内存划分到了足够的内存使摄像头能够正确运行。
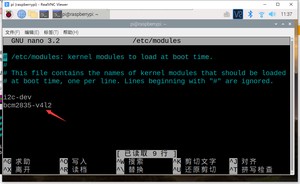
方法二: 加载摄像头驱动
解决方法
解决方法
1、提前下载该字体到指定目录下
2、修改 文件
在文件yolov5/utils/plots.py中,找到以下代码:
修改为:
1、不同尺寸屏幕的分辨率各不相同
2、如果采用7寸屏幕,则修改 hdmi_cvt 1024 600 6 0 0 0
- YOLOv5s网络模型讲解(一看就会)
- 生活垃圾数据集(YOLO版)
- YOLOv5如何训练自己的数据集
- 双向控制舵机(树莓派版)
- ----------------------完整代码---------------------------
版权声明:
本文来源网络,所有图片文章版权属于原作者,如有侵权,联系删除。
本文网址:https://www.mushiming.com/mjsbk/14628.html