
所以这里再次回顾一下检测直线的算法之——Hough变换。
Hough直线检测
1.直线坐标参数空间
在图像x−y坐标空间中,经过点(,)的直线表示为:
其中,参数a为斜率,b为截矩。
通过点(,)的直线有无数条,且对应于不同的a和b值。
这样就变换到了参数平面a−b。这个变换就是直角坐标中对于(,)点的Hough变换。
该直线是图像坐标空间中的点(,)在参数空间的唯一方程。考虑到图像坐标空间中的另一坐标(,),它在参数空间中也有相应的一条直线,表示为:
这条直线与点(,)在参数空间的直线相交于一点(,),如图所示:
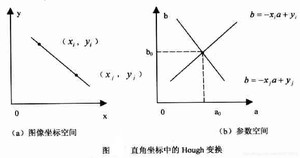
图像坐标空间中过点(,)和点(,)的直线上的每一点在参数空间a−b上各自对应一条直线,这些直线都相交于点,而a0、b0就是图像坐标空间x−y中点(,))和点(,)所确定的直线的参数。
反之,在参数空间相交于同一点的所有直线,在图像坐标空间都有共线的点与之对应。根据这个特性,给定图像坐标空间的一些边缘点,就可以通过Hough变换确定连接这些点的直线方程。
具体计算时,可以将参数空间视为离散的。建立一个二维累加数组A(a,b),第一维的范围是图像坐标空间中直线斜率的可能范围,第二维的范围是图像坐标空间中直线截矩的可能范围。开始时A(a,b)初始化为0,然后对图像坐标空间的每一个前景点(xi,yi),将参数空间中每一个a的离散值代入式子(2)中,从而计算出对应的b值。每计算出一对(a,b),都将对应的数组元素A(a,b)加1,即A(a,b)=A(a,b)+1。所有的计算结束之后,在参数计算表决结果中找到A(a,b)的最大峰值,所对应的a0、b0就是原图像中共线点数目最多(共A(a,b)个共线点)的直线方程的参数;接下来可以继续寻找次峰值和第3峰值和第4峰值等等,它们对应于原图中共线点略少一些的直线。
注意:由于原图中的直线往往具有一定的宽度,实际上相当于多条参数极其接近的单像素宽直线,往往对应于参数空间中相邻的多个累加器。因此每找到一个当前最大的峰值点后,需要将该点及其附近点清零,以防算法检测出多条极其邻近的“假”直线。
对于上图的Hough变换空间情况如下图所示。
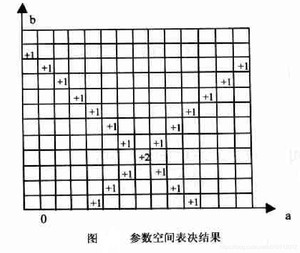
这种利用二维累加器的离散方法大大简化了Hough变换的计算,参数空间a−b上的细分程度决定了最终找到直线上点的共线精度。上述的二维累加数组A也被称为Hough矩阵。
2.极坐标参数空间
引入极坐标系的其中一个原因是如果有的直线的斜率不存在,那么直角坐标空间变化就不太合适。
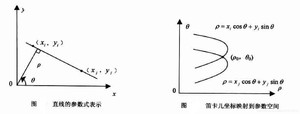
极坐标中用如下参数方程表示一条直线。
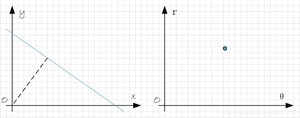
其中,ρ代表直线到原点的垂直距离,θ代表x轴到直线垂线的角度,取值范围为±90∘,如图所示。
与直角坐标类似,极坐标中的Hough变换也将图像坐标空间中的点变换到参数空间中。
更直观的,直角坐标系的三点共线,对应于 空间的多线共点。
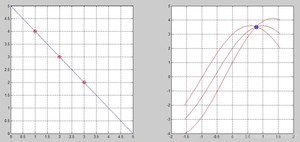
上面这个图是如何得到的呢?为什么三点共线在极坐标系是曲线的交点?
我们把直角坐标和极坐标空间融合起来考虑。
在极坐标空间使用hough变换来检测直线的思想就是:为每一个点假设n个方向的直线,通常n=180,此时检测的直线的角度精度为1°,分别计算这n条直线的)坐标,得到n个坐标点。如果要判断的点共有N个,最终得到的)坐标有N * n个。有关这N * n个)坐标,其中theta是离散的角度,共有180个取值。
最重要的地方来了,如果多个点在一条直线上,那么必有这多个点在某个值时,这多个点的近似相等于,也就是说这多个点都在极坐标直线上。
换句话说,在极坐标表示下,原图像坐标空间中共线的点变换到参数空间中后,在参数空间都相交于同一点,此时所得到的ρ、θ即为所求的直线的极坐标参数。与直角坐标不同的是,用极坐标表示时,图像坐标空间的共线的两点(xi,yi)和(xj,yj)映射到参数空间是两条正弦曲线或者参数空间的直线上,相交于点
下图就更直观了:
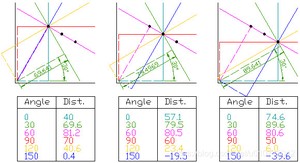
这个例子中,对于每个点均求过该点的6条直线的坐标,共求了3 * 6个)坐标。可以发现在 时,三个点的都近似为80.7,由此可判定这三个点都在直线(80.7,60)上。
通过 坐标系可以更直观表示这种关系,如下图:图中三个点的(r,theta)曲线汇集在一起,该交点就是同时经过这三个点的直线。
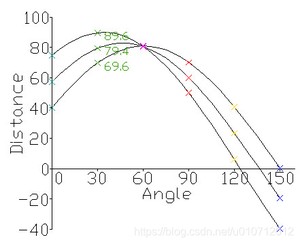
在实际的直线检测情况中,如果超过一定数目的点拥有相同的坐标,那么就可以判定此处有一条直线。在坐标系图中,明显的交汇点就标示一条检测出的直线。
如下图,可以判定出平面上的点共构成了两条直线,即检测出两条直线。
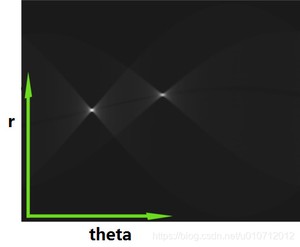
因此,我们可以通过检测 空间的交集点,来检测原始空间的线段。
接下来,就是要考虑 将 离散化,形成离散化的Hough空间,类似于一个矩阵/图像(如下图),用于统计交集点的个数。
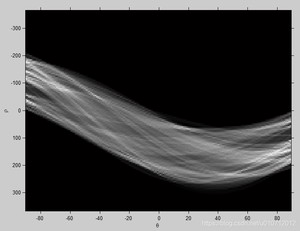
具体计算时,与直角坐标类似,也要在参数空间中建立一个二维数组累加器A,只是取值范围不同。对于一副大小为D×D的图像,通常ρ的取值范围为的取值范围为[−90∘,90∘]。计算方法与直角坐标系中累加器的计算方法相同,最后得到最大的A所对应的(ρ,θ)。
3.Hough变换直线检测的Matlab实现
通过Hough在二值图像中检测直线需要以下3个步骤。
·>(1)利用hough()函数执行霍夫变换,得到霍夫矩阵。
·>(2)利用houghpeaks()函数在霍夫矩阵中寻找峰值点。
·>(3)利用houghlines()函数在之前2步结果的基础上得到原二值图像中的直线信息。
3.1 霍夫变换–Hough
参数说明:
·BW是边缘检测后的二值图像;
·可选参数对param1,value1和param2,value2的合法取值如下:
返回值:
·H是变换得到的霍夫矩阵
·θ,分别对应于Hough矩阵每一列和每一行的θ,值组成的向量。
3.2 寻找峰值–houghpeaks
参数说明:
·H是hough()函数得到的霍夫矩阵
·numpeaks是要寻找的峰值数目,默认为1
·可选参数对param1,value1和param2,value2的合法取值如下:
3.3 提取直线段–houghlines
参数说明:
·BW是边缘检测后的二值图像
·theta,rho分别对应于Hough矩阵每一列和每一行的θ和ρθ和ρ值组成的向量。有hough()函数返回。
·peaks是一个包含峰值点信息的Q×2Q×2的矩阵,由houghpeaks()函数返回。
·可选参数对param1,value1和param2,value2的合法取值如下:
整体的代码实现
前50个极值点:
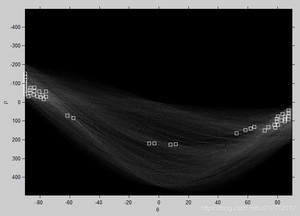
这里的Hough空间域就像上面的图,如果随便给我一张图片,我要检测出所有的车道线,那么就是在找Hough参数空间中那个二维累加器中找到峰值,也就是极值,那些极值就是可以被检测原图片的直线,那么将参数空间反映射回图像空间,就能知道哪些地方是直线了,虚线和直线的区别就在于一个阈值,这些参数空间的极值点到底我们选不选,有些极值点是长线段实线,有些极值点可能就是短线段,就是车道虚线,那么我们怎么通过Hough空间的图像判断实线与虚线呢?
参考:https://blog.csdn.net/s/article/details/
https://blog.csdn.net/ws_20100/article/details/
https://blog.csdn.net/sudohello/article/details/
版权声明:
本文来源网络,所有图片文章版权属于原作者,如有侵权,联系删除。
本文网址:https://www.mushiming.com/mjsbk/14388.html