
Arduino Uno 使用L298N直流电机驱动板,驱动2个有刷直流电机(马达),并且实现正转反转,本例子仅关注于驱动板的接通和转动,并不控制速度(PWM),如何控制速度将再其他例子说明,进行举一反三。
L298N是一款非常受欢迎的双H桥电机驱动模块,广泛应用于各种机器人和自动化项目中。它的设计使得控制直流电机变得简单而高效,特别适合初学者和爱好者。以下是L298N的一些关键特点和吸引人的地方:
L298N内部集成了两个H桥电路,可以同时控制两个直流电机的正反转。这使得它非常适合机器人项目,比如双轮驱动的小车。
每个H桥可以提供高达2A的持续电流,并且峰值电流可以达到3A。这意味着它可以驱动大多数小型和中型直流电机,满足各种项目需求。
L298N支持4.5V到46V的宽电压输入范围,适用于多种电源环境,从低压电池到高压电源都能轻松应对。
模块上的引脚布局清晰明了,配合Arduino等微控制器使用非常方便。只需几个简单的连接和几行代码,就可以实现电机的正反转和速度控制。
L298N模块内置了过热保护和短路保护功能,确保在高负载或异常情况下模块和电机的安全。
无论是DIY机器人、智能小车、机械臂,还是其他需要电机控制的项目,L298N都能胜任。它的多功能性和可靠性使其成为众多创客和工程师的首选。
L298N通常以模块的形式出现,带有螺丝端子和跳线帽,方便快速连接和调试。这种模块化设计不仅节省了时间,还减少了焊接和接线的麻烦。
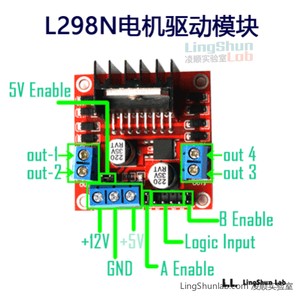
- +12V:电机电源输入引脚,连接电机所需的工作电压(通常在7V-35V之间)。
- +5V:逻辑电源引脚,通常连接到5V电源,用于为内部逻辑电路供电。如果模块内置了5V稳压器,可以通过跳线帽选择是否使用外部5V电源。
- GND:地引脚,连接电源地。
- Logic Input
:逻辑输入引脚,包括以下四个引脚,用于控制电机的转动方向:
- IN1:输入1
- IN2:输入2
- IN3:输入3
- IN4:输入4
- A Enable:使能A通道(ENA),用于控制电机A的启用和速度调节。通常连接到PWM信号。
- B Enable:使能B通道(ENB),用于控制电机B的启用和速度调节。通常连接到PWM信号。
- Out 1:输出1,连接电机A的一端。
- Out 2:输出2,连接电机A的另一端。
- Out 3:输出3,连接电机B的一端。
- Out 4:输出4,连接电机B的另一端。
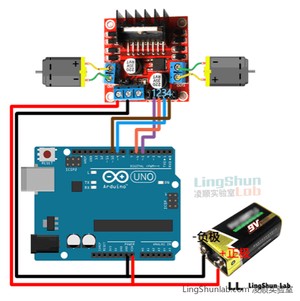
- 定义了四个整数变量、、和,分别对应Arduino的引脚5、6、9和10。这些引脚将用于控制电机的转动方向。
- 在函数中,将四个引脚的模式设置为(输出模式),以便可以通过这些引脚向外部电路输出电平信号。
- 函数是Arduino程序的主循环,在这里实现了电机的前进、停止和后退功能。
- 通过函数设置引脚的电平(HIGH或LOW),控制电机的转动方向。
- 表示延时1秒。
- 通过将所有控制引脚设置为低电平(LOW),实现电机的停止。
- 表示延时0.5秒。
- 通过调整电平设置,实现电机的反向转动。
- 表示延时1秒。
程序上传后可以看到电机转动。
版权声明:
本文来源网络,所有图片文章版权属于原作者,如有侵权,联系删除。
本文网址:https://www.mushiming.com/mjsbk/10436.html