
而影响波谷特性的关键因素有以下几点:
(1)波峰间的间隔 (波峰离得越远,分离这些模式的机会越大);
(2)图像中的噪声内容 (模式随噪声的增加而展宽);
(3)物体和背景的相对尺寸;
(4)光源的均匀性;
(5)图像反射特性的均匀性。
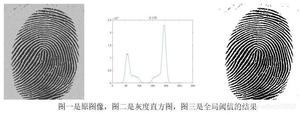
当物体和背景像素的灰度分布十分明显时,可以用适用于整个图像的单个 (全局) 阈值。
实验思想
在大多数应用中,通常图像之间有较大变化,即使全局阈值是种合适的方法,也需要有能对每幅图像自动估计阈值的算法。下面的迭代算法可用于这一目的:
1.为全局阈值 T 选择一个初始估计值。
2.使用用初始的 T 分割该图像。这将产生两组像素:
G1 由灰度值大于 T 的所有像素组成,G2 由所有小于等于 T 的像素组成。
3.对 G1 和 G2 的像素分别计算平均灰度值 (均值)m1 和 m2。
4.计算一个新的阈值: T = (m1 + m2)/2
5.重复步骤 2 到步骤 4,直到连续迭代中的 T 值间的差小于个预定义的参数 dT 为止。
代码
主函数:
功能函数:
实验结果
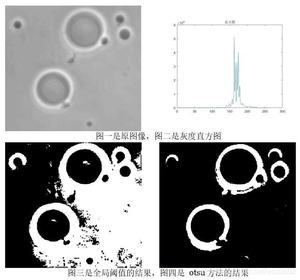
Otsu 方法是最佳的,因为它使得类间方差最大化。其基本思想是,适当的阈值化的类就其像素灰度值而言,应当是截然不同的,相反地,就其灰度值而言,给出最佳类间分离的阈值 将是最佳的阈值。除了其最佳性之外,Otsu 方法还有一个重要的特性,即它完全以在一幅图像的直方图上执行计算为基础,直方图是很容易得到的一维阵列。
实验思想
Otsu 算法计算步骤如下:
1.计算输人图像的归一化直方图。使用 pi,i=0,1,2,.,L-1 表示该直方图的各个分量。
2. 对于 k=0, 1,2,.,L-1,计算累积和 P1(k) 和 P2(k), 计算公式为:
3.对于 k=0,1,2…,L-1, 计算累积均值 m1(k) 和 m2(k)。计算公式为:
4.计算全局灰度均值 mg。计算公式为:
5.对于 k=0,1,2…,L-1, 计算类间方差。计算公式:
6.得到 Otsu 阈值 k,即使得 b2(k) 最大的 k 值。如果最大值不唯一,用相应检测到的各个值 k 的平均得到 k*。
代码
主函数:
功能函数:
实验结果
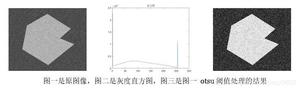
这道题未在本次实验要求范围内,但给了这张图片,于是进行了下面的实验。
实验思想
噪声会将简单的阈值处理问题变得不可解决,当噪声不能在源头减少,并且阈值处理又是所以选择的分割方法时,那么通常能增强性能的一种技术是,在阈值处理之前平滑图像。
部分核心代码
主函数:
功能函数前面都已经给出过
实验结果
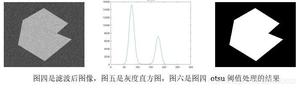
由于噪声或者光照不均匀等等一系列问题,导致无法直接进行阈值分割,图像平滑和边缘信息有益于阈值处理,但是在更经常的情况下,上述的两种做法效果不明显,只能使用可变阈值来进行解决。
实验思想
可变阈值处理最简单的方法之一是,把一幅图像分成不重叠的矩形。这种方法用于补偿光照和或反射的不均匀性。选择的矩形要足够小,以便每个矩形的光照都近似是均匀的。
代码
主函数:
功能函数:
实验结果


版权声明:
本文来源网络,所有图片文章版权属于原作者,如有侵权,联系删除。
本文网址:https://www.mushiming.com/mjsbk/3614.html