
本文课件来自香港科技大学,我的母校,感谢ELEC
本节介绍RRT/RRT*的算法:
RRT的基本原理是:

我们首先初始化我们的起点,接下来随机撒点,选出一个x_rand, 在x_near 和 x_rand之间选择一个x_new, 再在原有的已经存在的x中找到离这个点最近的点将这两个点连接起来,同时这个最近的点也会作为x_new的父节点。
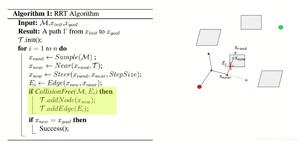
RRT算法的伪代码如下:
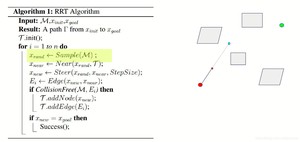
对照着图,再看一次:
首先我们随机生成一个点,x_rand
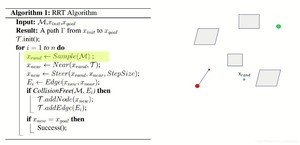
然后再tree上面找到最近点,作为x_near
然后取两者中间的点作为x_new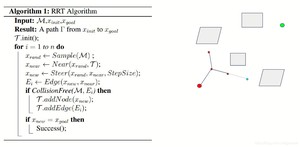
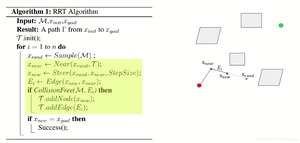
最后,还要做一次collision checking, 看看生成的点是不是和x_near 连接起来后会碰撞障碍物:
按照这个方法一直搜索,一直打到停止搜索的标准,比如x_new与终点的距离小于某个极小的epsilon。另外一个,在搜索最近的x_near的时候,我们可以使用KD tree来加速搜索:
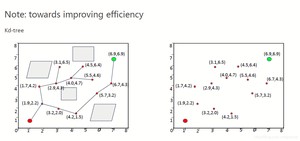
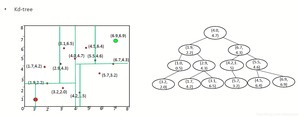
具体看一下(https://blog.csdn.net/junshen1314/article/details/)
接下来我们分析一下RRT的优缺点:
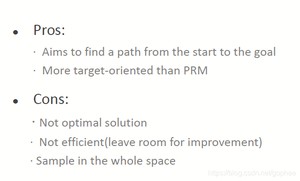
RRT比概率图方法更加有效,但是这依然不是个高效的搜索方法,并且获得的解也不是最优解。
接下里,我们有一些对RRT的优化方法:
第一种方法就是双向RRT, 意思就是从起点和终点同时搜索,一直到两棵树交汇
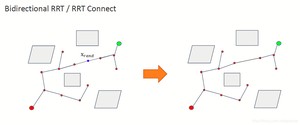
下图中可以看到,起点和终点同时生成树进行搜索。

第二种方法我们介绍RRT*
伪代码流程如下:
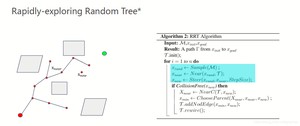
这个算法是在RRT基础上的改进,改进的地方是这个x_near 和 x_new不会直接连接起来,而是做一个优化处理,方式就是:

我们在x_near附近圈一个圆,将被圈在圈内的各个点与x_new的距离作对比:
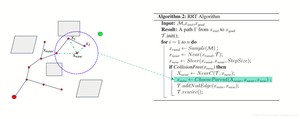
如果x_near 到 x_new的距离比通过x1,x2后再到x_new的距离低,就将x_near和x_new连接起来。
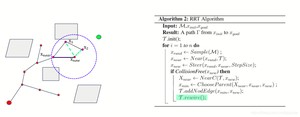
同时我们还要对比,从x_near出发,到x2的距离最短值:

我们发现通过x_new之后到达x2的距离更短,所以就将x2的父节点更新为x_new. 这个步骤我们称之为rewire function.
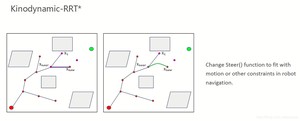
当然我们还有其他的优化,包括考虑动力学限制的优化:
接下来我们提供一系列源代码供读者进行测试:
首先提供2D RRT
另外请调用函数:
还需要图片:
把这个图片保存在运行目录下。
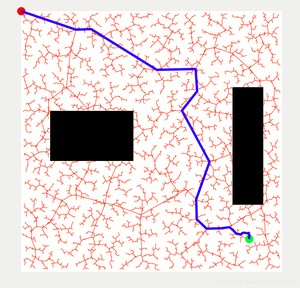
最后运行的效果是这样的:
 Matlab社区中,我们也找到了参考的代码,RRT* 2D/3D
Matlab社区中,我们也找到了参考的代码,RRT* 2D/3D
其中调用函数:
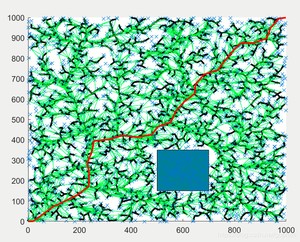
运行效果是这样的:
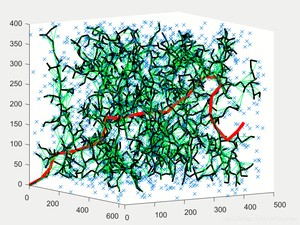
RRT* 3D
调用的函数是:
运行的结果是:
版权声明:
本文来源网络,所有图片文章版权属于原作者,如有侵权,联系删除。
本文网址:https://www.mushiming.com/mjsbk/1838.html